Description
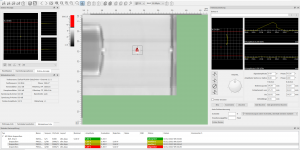
The automated EloScan Eddy Current inspection system is mainly conceived for the inspection of rotationally symmetric engine parts. The system can also be used to inspect other complex component geometries owing to its universal structure. The precise sensor guidance makes it possible to inspect the part along its surface, even on points which are difficult to access, owing to the customized sensor fixtures.
In addition to the rotating and oscillating scanning of the component surface with a static sensor, bores can also be inspected with a rotating sensor system as part of the inspection process. The application of sensor arrays in multiplex mode has proven to be useful for this system.